

Uber恢复自动驾驶汽车测试任务,人工辅助驾驶
据Ars Technica北京时间7月25日报道,Uber当地时间星期二宣布,它将恢复在匹兹堡街道上测试自动驾驶汽车。但它还宣布,最初,其自动驾驶汽车将以“手动模式”行驶,由驾驶员而非其软件操控。
Uber自动驾驶汽车项目领导人埃里克·梅霍弗(Eric Meyhofer)写道,“开始时汽车将以手动模式行驶,由一名‘任务专家’驾驶车辆。虽然我们渴望恢复对自动驾驶系统的测试,我们把手动驾驶作为重要的第一步。”
以手动模式行驶,使得Uber不能对其自动驾驶软件直接进行测试,但它将使Uber能收集数据,改进其地图和模拟软件。这还是Uber测试匹兹堡政治氛围的一个途径。Uber在匹兹堡恢复自动驾驶汽车测试的计划,最初遭到市长比尔·佩杜托(Bill Peduto)的反对。
Uber表示,它将采取预防措施,确保新的测试体制更安全。
每辆汽车中将安排两名工作人员——被称作“任务专家”,其中一人负责驾驶车辆(开启自动驾驶模式后负责监控汽车),另外一个人将“记录值得注意的事件”——提供数据和反馈信息,Uber工程师随后将利用这些信息改进汽车的表现。
在今年3月份的交通事故前,Uber要求一名工作人员同时完成这两项任务——这显然会造成驾驶员分心。Uber表示,车载系统进行了重新设计,把造成驾驶员精力不集中的元素减少到最小。Uber还对安全驾驶员进行了更多培训。
最重要的是,Uber称它将不会再关闭其沃尔沃汽车上的防撞系统。3月份的交通事故后,有媒体报道称Uber关闭了防撞软件,如果汽车有与行人或其他车辆相撞的风险时,依靠安全驾驶员刹车。
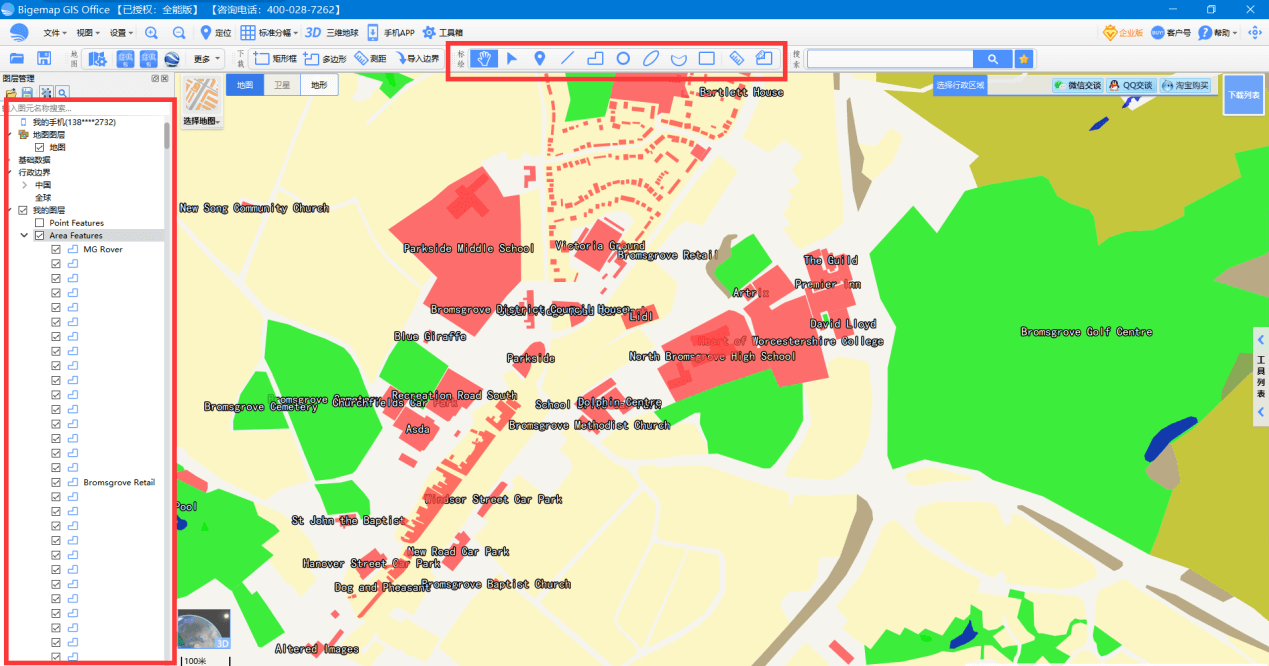
Bigemap GIS Office 国产基础软件
Bigemap GIS Office是一个全面且易于使用的国产化基础软件,为用户提供数据处理、编辑、数据分析、集成以及可视化呈现的综合数据集平台。支持上百种数据格式:shp/kml/kmz/dwg/dxf/gpx/csv/excel/txt/tiff/geotiff/osgb/mbtiles/tiles等,对数据流转、嵌入、融合、以及更多地为用户提供数据的增强处理及多种分析工具。在不同场景不同行业下支持坐标系转换CGCS2000/WGS84/Xi’an80/Beijing54/UTM等多种投影互转互换、支持专题地图、大数据加载、航拍影像、矢量数据、栅格数据的导入导出、瓦片切片及地图服务发布。
了解详情>>



 在线客服(直接聊)
在线客服(直接聊)
